
1. Układy cyfrowe są to ukłądy logiczne budowane za pomocą sygnałów logicznych, tworzą je bramki logiczne.
Bramki logiczne : AND, OR, NOT, XOR, NOR, NOND......
Cyfrowe układy scalone są wytwarzane za pomocą technologi półprzewodnikowej na monolitycznej płytce przewodnika (zazwyczaj krzemu [si])
Przy pomocy technologi półprzewodnikowej na płytce krzemowej (czystym krzemie) są wytwarzane kolejne warstwy półprzewodników monolitycznych (jednorodnych). Aby utworzyc ukłądy cyfrowe należy poddać różnym procesom płytkę krzemową i wytworzyc warstwy polikrystaliczne (są to warstwy domieszkowanego krzemu czyli warstwy zawierajace domieszki innych pierwiastków najczęściej z grypy III i V - są to zwiazki półprzewodnikowe typu A(III) i B(V) np. arsenekgalu GaAs)
Układy cyfrowe powstają poprzez wytworzenie bramek logicznych na jak najmniejszej powierzchni połączonych ze sobą w sposób równoległy i szerogowy (mieszany)
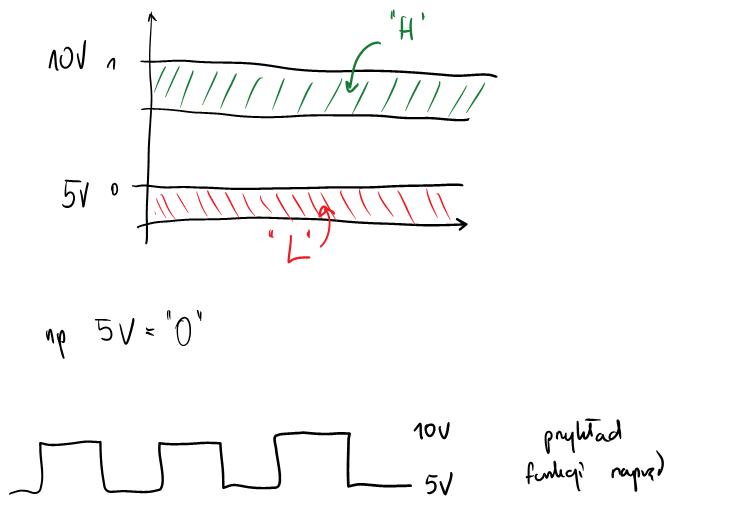
Sygnały elektryczne powstające w ukłądach cyfrowych są realizowane za pomocą dwuch wartości logicznych 0 i 1
''0'' - ''L'' (low) - niski poziom sygnału
''1'' - ''H'' (Hight) - wysoki poziom sygnału
Możemy projektować bramki, które określa sie jako TTL (układ TTL jest najbardziej powszechnym)
2. Cechy układów cyfrowych
- przesyłąjąsygnały logiczne 0 i 1 na wejsciu ukłądu oraz posiadają ustalony sygnał na wyjściu ukłądu
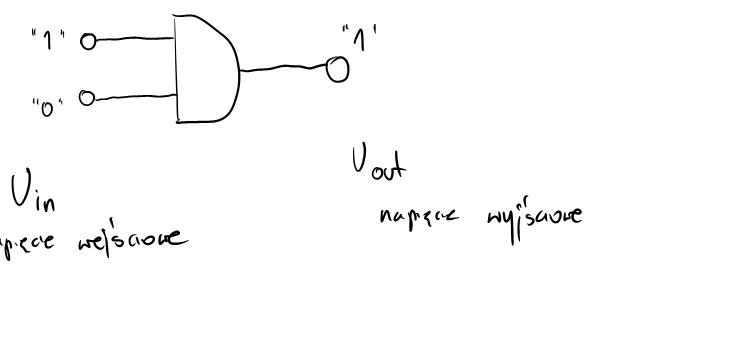
- realizują one określoną funkcję która zalezy od sygnału wejsćiowego oraz budowy wewnętrznej układu.
3. Zalety i wady
zalety:
Przesyłanie sygnału odbywa sie bez strat
Przesyłanie sygnału logicznego który możemy łatwo przekształcić na sygnał elektryczny
Odpornosć na zakłucenia elektryczne
Tworzenie ukłądów programowalnych których działąnie określa program komputerowy
Wady:
Podstawowoą wadą jest wprowadzenie zabezpieczeń które umożliwyłyby odporność (większą) odpornosć na zakłucenia elektryczne i określenie czasu propagacji (tp) który określa częstość podawania sygnału (należy przestrzegać jednoczesnego przesyłania sygnałów logicznych pochodzących z dwóch różnych źródeł.
4. Parametry ukłądu cyfrowego
tp [ns] - czas propagacji
f [Hz] - częstotliwość przsyłanego sygnału
5. Rodzaje ukłądów
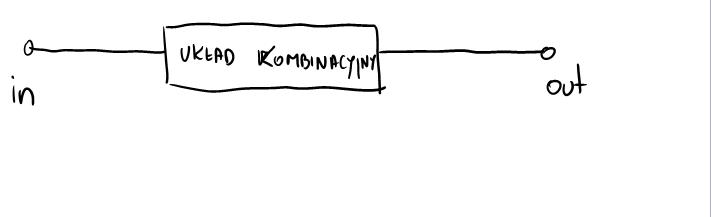
Najważniejszymi rodzajami ukłądów cyfrowych jest kombinacyjny i sekwencyjny
a) układ kombinacyjny - jest to układ charakteryzujący się tym że stan wyjść zależy od podanego stanu logicznego na wejściu (czyli zależy tylko od podanego stanu na wejsciu). Stan wyjść opisują funkcje boolowskie (algebra boole'a).
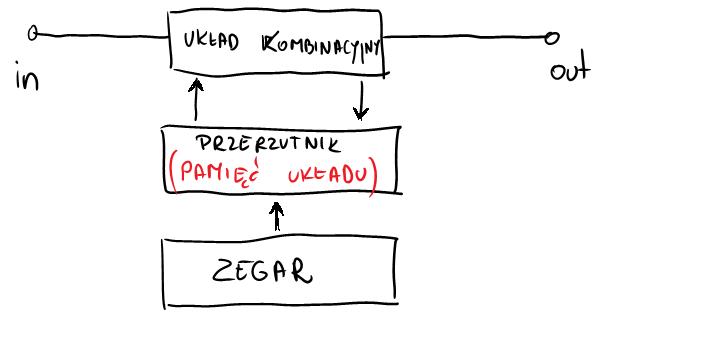
b) układ sekwencyjny - w układach sekwencyjnych stan wyjść zależy od poprzedniego stanu wyjściowego. czyli nie tylko od stanu wprowadzonego na wejściu.
5 .W ukłądach cyfrowych nie występuje sprzężenia zwrotnego, tak samo w układach cyfrowych występuje zjawisko Hazardu.
Wyróżniamy dwa rodzaje ukłądów cyfrowych
- synchroniczne - w ukach synchronicznych nie mamy zjawiska Hazardu
- niesynchroniczne - występuje zjawisko Hazardu
6. Do funkcjonalnych ukłądów kombinacyjnych zaliczamy
a) Komutatory
- multiplekser
- demultiplekser
b) konwertery kodów
- kodery
- dekodery
- transkodery
c) bloki arytmetyczne
- sumator
- komparator
- układ ALU
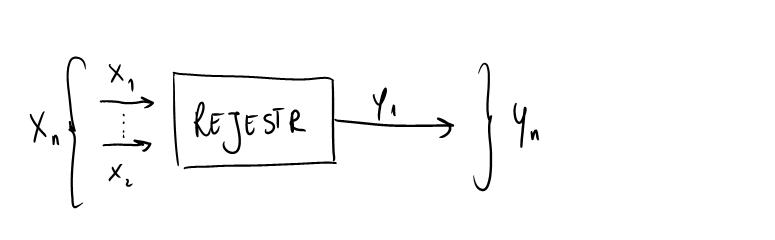
7. W układach sekwencyjnych stan wejść nie opisuje jednoznacznie stanu wyjść, ponieważ zależy on również poprzedniego stanu wyjść oraz od budowy układu cyfrowego ( np. sposób łączenia bramek). Poprzedni stan wyjść zwany jest stanem wewnetrznym układu i jest zapamiętywalny w zespole rejestrów (pamięci układu). Jeżeli stan wewnetrzny ukłądu nie ulega zmianie pod wypływem podania na wejście różnych stanów x wówczas na wyjscie podawany jest stan y .
Wyróżniamy dwa rodzaję układów sekwencyjnych
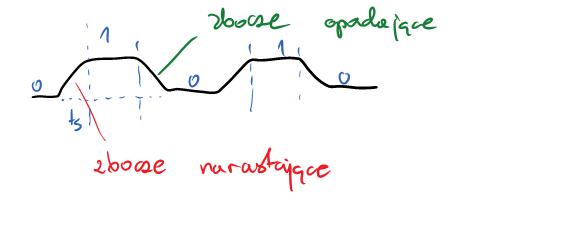
- synchroniczne - zmiana stanu wewnętrznego następuje wyłącznie w określionych chwilach który wyznacza tzw sygnał zegarowy (clock). Poziom sygnału określony przez tp i ts określa rónież zegar. Każdy układ synchroniczny posiada wejście zegarowe oznaczone zwyczajowo symbolem C, CLK, Clock. Charakterystycznym dla układów synchronicznych jest to że nawet kiedy stan wejściowy sie nie znienia ale stan wewnetrzny w kolejnych taktach zergara może ulec zmianie. Isnieje zagrożenie zjawiska nakładania się.
Jeżeli układ reaguje na określone stany logiczne zegara wówczas taki układ nazywamy układem statycznym. Natomiast jeżeli ukłąd reaguje na zmiany sygnału zegarowego wówczas jest to ukłąd dynamiczny, który moze mieć wyzwalane zbocze z narastającym lub opadającym impulsem.
Taki układ nazywamy ukałdem autonomicznym którym podstawowym układem są tak zwane liczniki
- asynchroniczne - zmiania sygnałów wejściowych X wywyołuje zmianę sygnałów wyjściowych Y, w związku z tym układy te są szybkie ale podatne na zjawisko hazardu i wyścigu. Zjawisko wyscigu występuje gdy conajmniej 2 sygnały wejściowe zmieniają swój stan w jednej chwili czasu, jednak ze względu na nie zerowy czas przełączania przerzutników i bramek zmiana jednego sygnału może nastąpić nieco szybciej niż innych tworząc trudne do wykrycia błędy czyli jednoczesna zmiana kilku sygnałów jest niemożliwa.